n_modes = 50
n_steps = 44100
sample_rate = 44100
dt = 1.0 / sample_rate
excitation_position = 0.2
readout_position = 0.5
initial_deflection = 0.04
n_gridpoints = 101 # number of gridpoints for evaluating the eigenfunctions
string_params = StringParameters()Non-linear models
The non-linear models are also similar to simulate. We add a non-linear to the equation:
\[\begin{equation} \rho \ddot{w} + \left(d_1 + d_3 \Delta\right)\dot{w} + (D \Delta \Delta - T_0 \Delta) w = f_{\text{ext}} - f_{\text{nl}}, \end{equation}\]
where \(f_{\text{nl}}\) is the non-linear term. Again we get damped harmonic oscillators:
\[\begin{equation} \ddot{q}_{\mu} + 2\gamma_{\mu}\dot{q}_{\mu} + \omega_{\mu}^2 q_{\mu} = \bar{f}_{\text{ext},\mu} - \bar{f}_{\text{nl},\mu}, \end{equation}\]
where \(\bar{f}_{\text{nl},\mu}\) is the non-linear term in modal space. This term differs depending on the type of non-linearity and whether we are simulating a string, membrane or plate.
Tension modulated string
For tension-modulated strings the non-linear term expanded in modal coordinates is given by:
\[\begin{equation} \bar{f}_{nl} = \lambda_\mu q_{\mu} \left(\frac{E A}{2 L}\right) \sum_{\mu} \frac{\lambda_{\mu} q_{\mu}^2}{||\Phi_{\mu}||^2} \end{equation}\]
First, we set up the parameters for the string.
Get the eigenpairs and the initial condition
Code
lambda_mu = string_eigenvalues(n_modes, string_params.length)
wn = np.sqrt(lambda_mu)
grid = np.linspace(0, string_params.length, n_gridpoints)
K = string_eigenfunctions(wn, grid)
u0_modal = create_pluck_modal(
lambda_mu,
pluck_position=excitation_position,
initial_deflection=initial_deflection,
string_length=string_params.length,
)
u0 = inverse_STL(K, u0_modal, string_params.length)
fig, ax = plt.subplots(1, 1, figsize=(6, 2))
ax.plot(grid, u0)
ax.set_xlabel("Position (m)")
ax.set_ylabel("Deflection (m)")
ax.set_title("Initial deflection of the string")
ax.grid(True)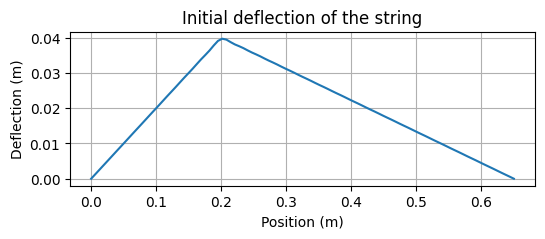
Define the non-linear term and integrate in time
Code
gamma2_mu = damping_term(string_params, lambda_mu)
omega_mu_squared = stiffness_term(string_params, lambda_mu)
string_tau = string_tau_with_density(string_params)
string_norm = string_params.length / 2
# include the norm and lambda_mu to make it more compact
string_tau = string_tau * lambda_mu / string_norm
nl_fn = make_tm_nl_fn(lambda_mu, string_tau)
_, modal_sol = solve_tf_initial_conditions(
gamma2_mu,
omega_mu_squared,
u0=u0_modal,
v0=jnp.zeros_like(u0_modal),
dt=dt,
n_steps=n_steps,
nl_fn=nl_fn,
)
# transpose to have modes in the first dimension
modal_sol = modal_sol.T
print(modal_sol.shape)(50, 44100)Code
mu = np.arange(1, n_modes + 1) # mode indices
readout_weights = evaluate_string_eigenfunctions(
mu,
readout_position,
string_params,
)
# at a single point
u_readout = readout_weights @ modal_sol
# at all points
sol = inverse_STL(K, modal_sol, string_params.length)
display(Audio(u_readout, rate=sample_rate))
fig, ax = plt.subplots(1, 1, figsize=(6, 2))
ax.plot(u_readout)
ax.set_xlabel("Sample")
ax.set_ylabel("Deflection (m)")
ax.set_title("Deflection of the string at a single point")
ax.set_xlim(-2, sample_rate // 10)
ax.grid(True)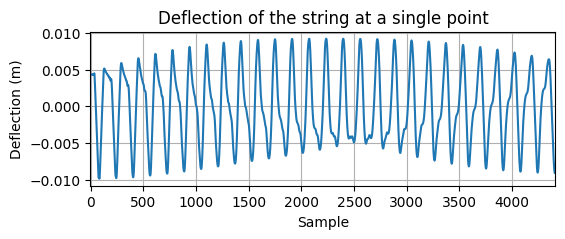
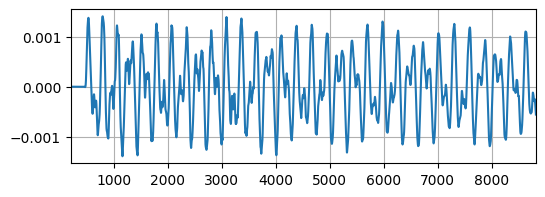
Tension modulated plate
The tension-modulated plate works just like the string we saw earlier, but with a slightly different factor:
\[\begin{equation} \bar{f}_{nl} = \lambda_\mu q_{\mu} \left(\frac{E h}{2 L_x L_y (1 - \nu^2)}\right) \sum_{\mu} \frac{\lambda_{\mu} q_{\mu}^2}{||\Phi_{\mu}||^2} \end{equation}\]
Define the parameters for the plate
Code
n_modes_x = 30
n_modes_y = 30
n_modes = 64
n_steps = 44100
sample_rate = 44100
dt = 1.0 / sample_rate
excitation_duration = 1.0 # seconds
excitation_amplitude = 100 # newtons
force_position = (0.05, 0.05)
readout_position = (0.1, 0.1)
plate_params = PlateParameters(
Ts0=0.0,
d1=0.0,
d3=0.0019625,
rho=7850,
E=2e11,
nu=0.3,
l1=0.2,
l2=0.3,
)Get the eigenpairs and the excitation. We denote the retained eigenfunctions by \(\phi_{\mu}(x,y)\equiv\phi_{\,m,n}(x,y)\) and gather them into the column vector
\[ \Phi(x,y)=\bigl[\phi_{1}(x,y),\ldots,\phi_{M}(x,y)\bigr]^{\mathsf T}\in\mathbb R^{M}. \]
Evaluating this vector at the excitation and readout positions gives \(\Phi_{\mathrm{ext}}\) and \(\Phi_{\mathrm{read}}\), respectively. A scalar point load \(f_{\mathrm{ext}}^{\,n}\) applied at \((x_{\mathrm{ext}},y_{\mathrm{ext}})\) excites the modes producing the modal coordinate vector
\[ \mathbf{q}^{\,n}= \Phi_{\mathrm{ext}}\,f_{\mathrm{ext}}^{\,n}\in\mathbb R^{M}, \]
and the displacement measured at the readout location is reconstructed through
\[ w_{\mathrm{read}}^{\,n}= \frac{\Phi_{\mathrm{read}}^{\mathsf T}\mathbf{q}^{\,n}} {\lVert \Phi\rVert^{2}} . \]
where \(n\) is the time step. For the rectangular plate \(\lVert \Phi\rVert^{2} = \frac{L_x L_y}{4}\).
Code
wnx, wny = plate_wavenumbers(
n_modes_x,
n_modes_y,
plate_params.l1,
plate_params.l2,
)
lambda_mu_2d = plate_eigenvalues(wnx, wny)
n_gridpoints_x = 101
n_gridpoints_y = 151
x = np.linspace(0, plate_params.l1, n_gridpoints_x)
y = np.linspace(0, plate_params.l2, n_gridpoints_y)
K = plate_eigenfunctions(wnx, wny, x, y)
# Sort the eigenvalues and get the indices
indices = np.argsort(lambda_mu_2d.ravel())[:n_modes]
ky_indices, kx_indices = np.unravel_index(indices, lambda_mu_2d.shape)
ky_indices, kx_indices = ky_indices + 1, kx_indices + 1
selected_indices = np.stack([kx_indices, ky_indices], axis=-1)
lambda_mu = lambda_mu_2d.ravel()[indices]
rc = create_1d_raised_cosine(
duration=excitation_duration,
start_time=0.010,
end_time=0.012,
amplitude=excitation_amplitude,
sample_rate=sample_rate,
)
weights_at_ex = (
evaluate_rectangular_eigenfunctions(
selected_indices,
force_position,
params=plate_params,
)
/ plate_params.density
)
weights_at_readout = evaluate_rectangular_eigenfunctions(
selected_indices,
readout_position,
params=plate_params,
)
modal_excitation = np.outer(rc, weights_at_ex)Define the non-linear term and integrate in time
Code
omega_mu_squared = stiffness_term(
plate_params,
lambda_mu,
)
gamma2_mu = damping_term(
plate_params,
np.sqrt(omega_mu_squared),
)
plate_tau = (plate_params.E * plate_params.h) / (
2 * plate_params.l1 * plate_params.l2 * (1 - plate_params.nu**2)
)
plate_tau = plate_tau / plate_params.density
plate_norm = 0.25 * plate_params.l1 * plate_params.l2
plate_tau = plate_tau * lambda_mu / plate_norm
nl_fn = make_tm_nl_fn(lambda_mu, plate_tau)
_, modal_sol = solve_tf_excitation(
gamma2_mu,
omega_mu_squared,
modal_excitation,
dt,
nl_fn=nl_fn,
)
modal_sol = modal_sol.T
Von Karman plate
In the Von Karman plate we have a different non-linear term:
\[\begin{equation} \bar{f}_{nl} = \frac{E}{2 \rho ||\Phi||^2} \sum_{p, q, r}^n \frac{H_{q, r}^n C_{p, n}^s}{\zeta_n^4} q_p q_q q_r, \end{equation}\]
We will use the same parameters as in the tension-modulated plate above but now we need the coupling coefficients (assuming simply supported boundary conditions). Calculating the coupling coefficients can take a while, so we will only use 10 in-plane modes and all transverse modes.
Integrate in time. This is fast however with more modes it will take longer. In any case, this will take longer than the tension-modulated plate.
Code
gamma2_mu = damping_term(
plate_params,
lambda_mu,
)
omega_mu_squared = stiffness_term(
plate_params,
lambda_mu,
)
nl_fn = make_vk_nl_fn(H1_scaled)
_, modal_sol = solve_tf_excitation(
gamma2_mu,
omega_mu_squared,
modal_excitation,
dt,
nl_fn=nl_fn,
)
modal_sol = modal_sol.T